研究成果 B4-M1

OVERVIEW
慶應義塾大学理工学部システムデザイン工学科4年から慶應義塾大学大学院理工学研究科総合デザイン工学専攻修士課程1年春までの研究成果
テーマ:適応型ロボットに向けた可変減速機構
概要:
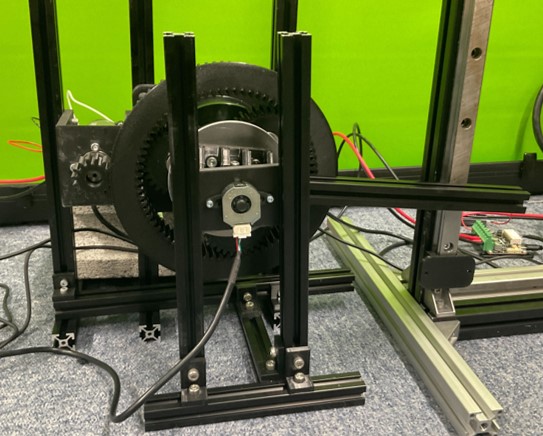
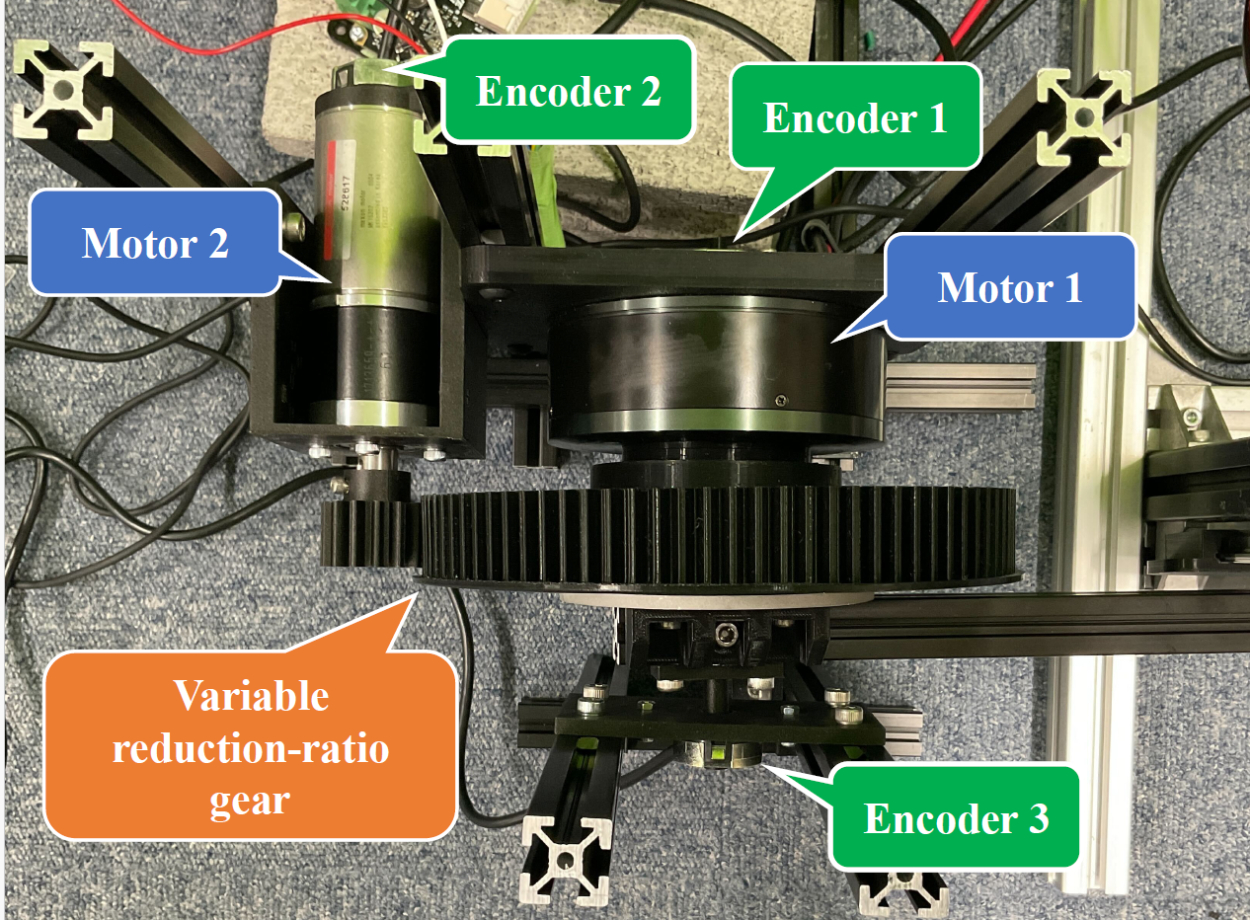
脚型ロボットが周囲の環境に適応するためには、多様な動作を実現する必要がある。しかし、一般的な電動モータでは、減速機によって減速比が固定されているため、トルクと速度のトレードオフが生じ、動作に限界がある。そこで本研究では、遊星歯車機構を活用した可変減速機構を導入し、ロボットの動作性能を向上させることを目指す。この機構により、状況に応じて減速比を柔軟に調整し、トルクと速度の最適なバランスを実現する可能性を検討する。
学会論文:
N. Iemura and S. Katsura, "Variable Reduction-ratio Gear for Environmentally Adaptive Robots," IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society, Chicago, IL, USA, 2024, pp. 1-6
https://ieeexplore.ieee.org/document/10906037
開発したもの:
・可変減速機構と1リンク実験機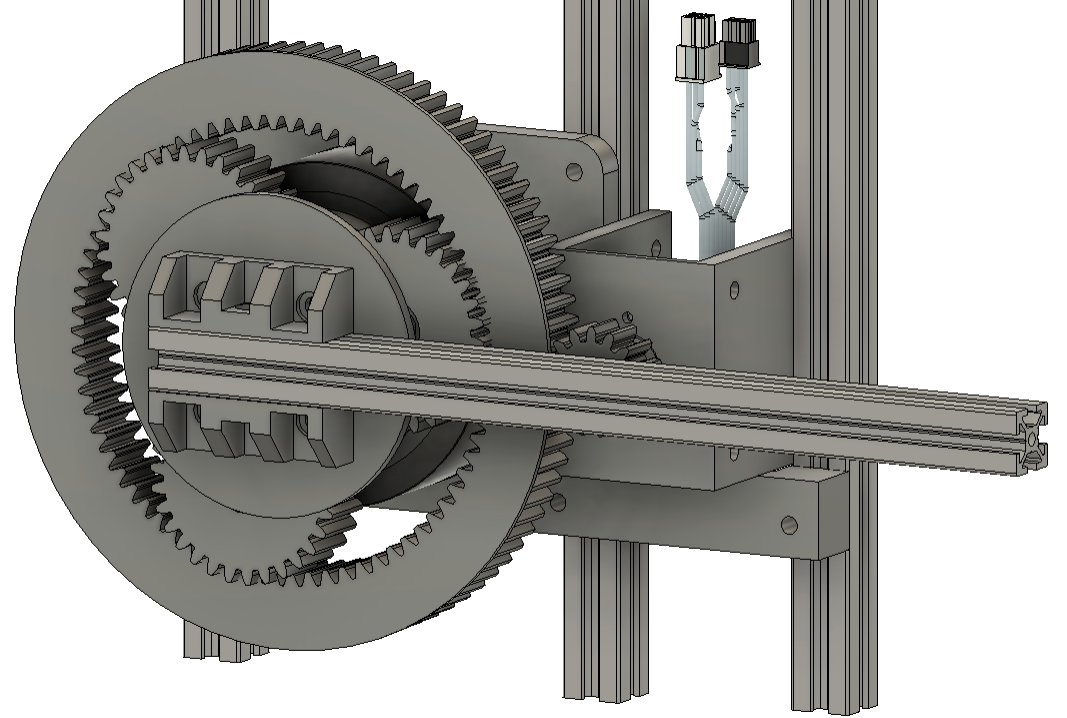
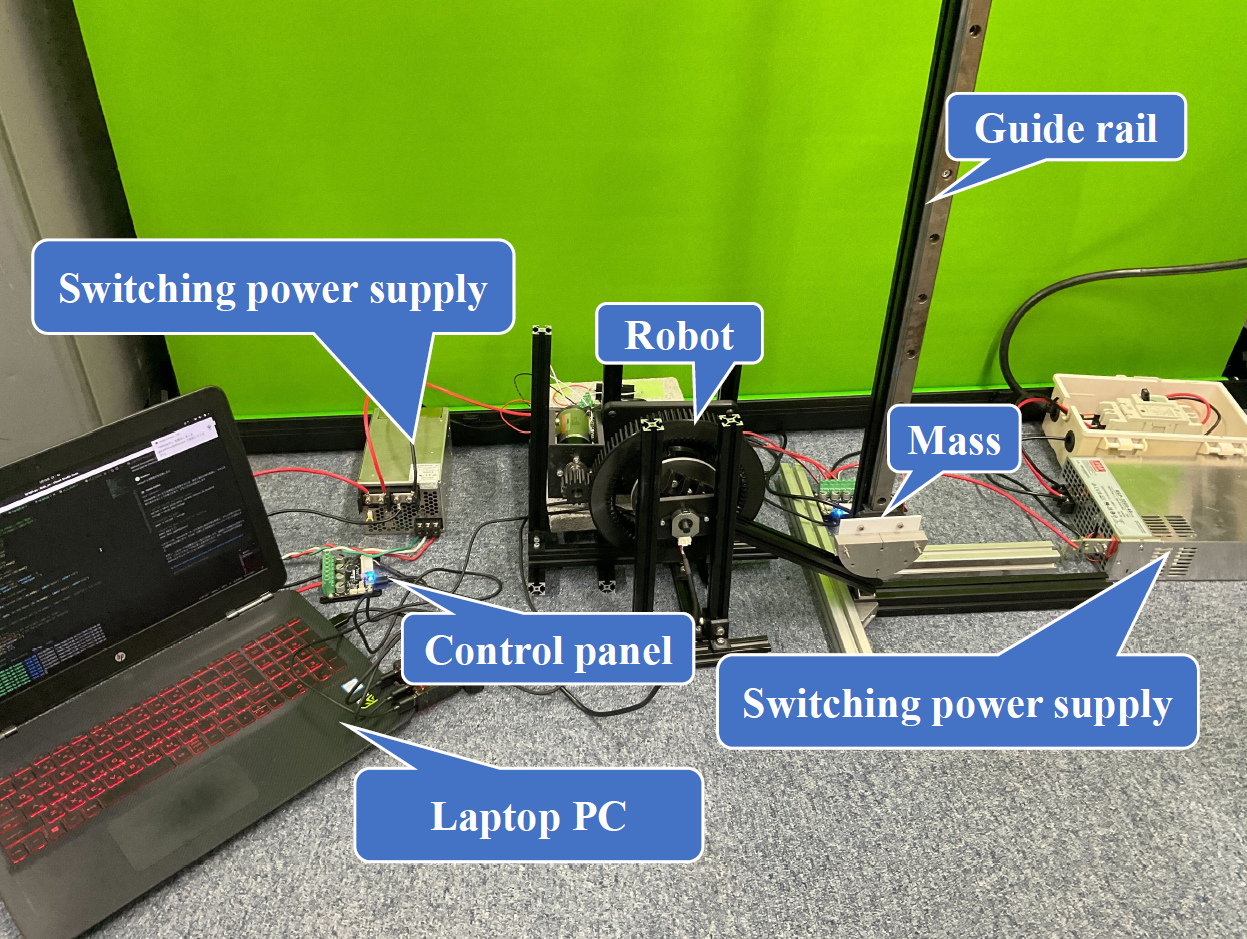
・ODRIVE S1(モータドライバ)によるモータ制御プログラム
https://github.com/N-Iemura/klab_ws/tree/master/ODRIVE_only